
El dia de hoy quiero mostrarles un nuevo proyecto que estuve haciendo para el canal, se trata de un alimentador para mascotas que se controla remotamente vía bluetooth, para que puedas darle un pequeño premio a tu mejor amigo cuando quieras y desde donde quieras.
El alimentador está pensado para que pueda hacerse con materiales medianamente accesibles:
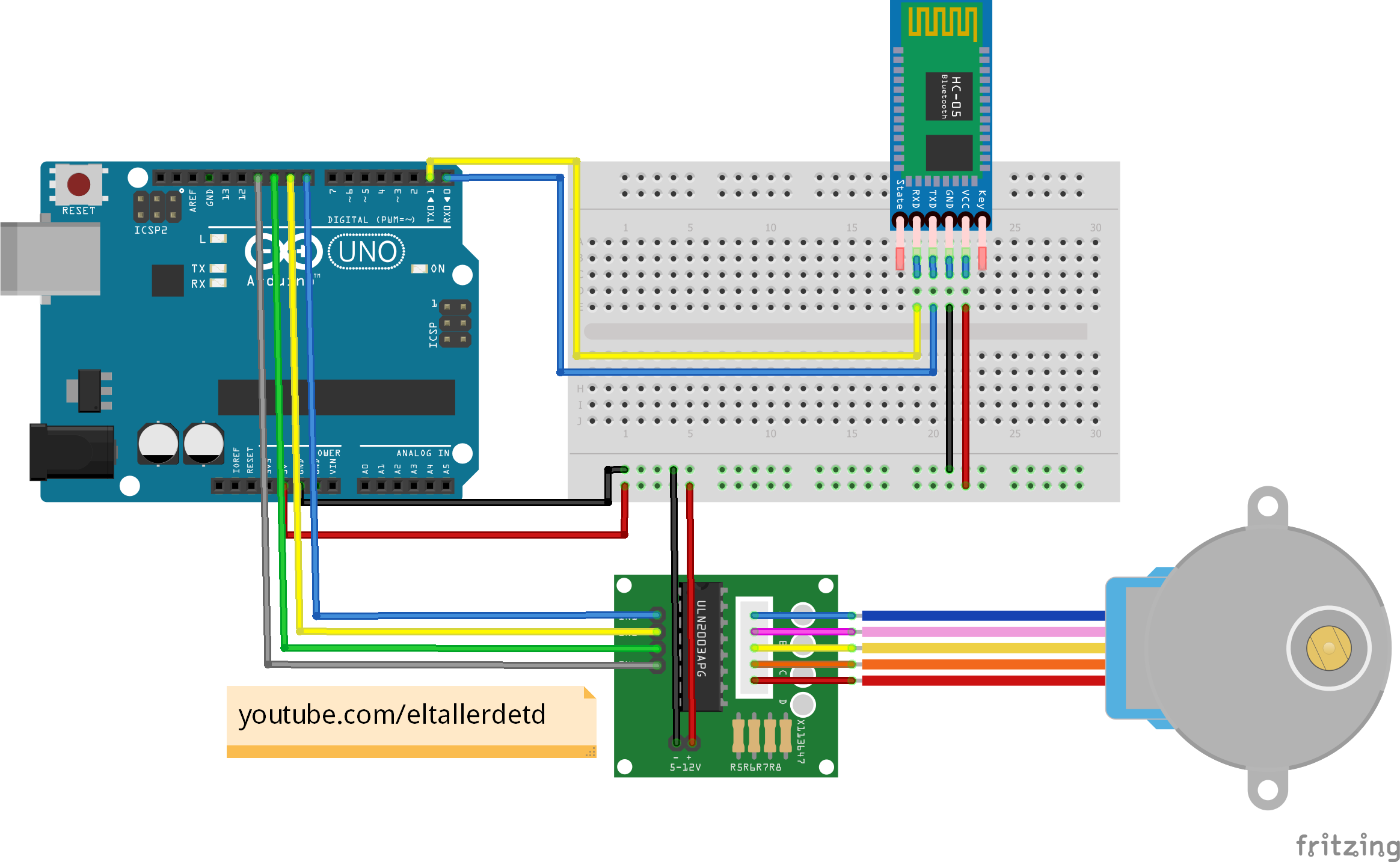
- Un Arduino UNO
- Un módulo bluetooth HC-06
- Un motor paso a paso con su respectivo driver, en este tutorial utilizaremos el 28BYJ-48.
- Un acople de pvc

Una vez tengamos todo reunido comencemos con las conexiones, estas son sencillas y no requieren de mucha explicación. Tomamos el driver del motor paso a paso que estemos utilizando y en el caso que sea bipolar conectamos sus salidas a los pines 8, 9, 10 y 11 de nuestro Arduino, además de alimentarlo con 5 volts. También preparamos el módulo bluetooth y conectamos sus pines de RX y TX de manera invertida a los pines 0 y 1 de nuestra placa, mientras que también lo alimentamos como se debe.
Entrando en el codigo lo primero que haremos sera incluir la librería Cheap Stepper, que nos servirá para controlar el motor paso a paso de una manera más sencilla y exacta, puedes encontrar el repositorio de GitHub para descargarlo pinchando aqui. El resto lo podes encontrar en el codigo acá abajo:
Una vez llegado este punto ya podríamos alimentar nuestro dispositivo y probar que todo funcione bien, para esto tan solo basta con descargar una aplicación como Bluetooth Terminal, que sirve para enviarle datos a nuestro módulo desde nuestro celular, y ver si el motor gira cuando le enviamos un 1.

Pero para ir un poco más allá podemos crear una aplicación propia y simplificar la tarea del usuario. Para eso cree una pequeña aplicación en App Inventor, la verdad que fue bastante simple y el resultado es bastante positivo, para descargarla podes hacer click aca.
Finalmente falta construir el alimentador para que funcione completamente, ya que hasta ahora solo tenemos la parte electrónica andando. Para esto vamos a adherir el motor paso a paso al acople de pvc y fijaremos una especie de tapa al motor en la parte interior del tubo, lo suficientemente liviana y de un tamaño adecuado como para que pueda girar. Este paso es muy relativo y puede variar según los materiales que tengas a mano, yo particularmente encontré este diseño sencillo y fácil de hacer, por eso sentite libre de mejorarlo o cambiarlo a tu forma y no te olvides de compartir los resultados.

Y para concluir una vez que lleguemos a este punto ya tendríamos lo que sería el alimentador funcionando y andando, lo que restaría para que quede terminado es adherirse o colocarlo en algún lugar donde sea accesible para nuestras mascotas, y que así nuestros mejores amigos puedan disfrutar de un regalo útil e innovador.


Recorda compartir este articulo con tus amigos, dejar un like y una suscripción en mi canal de Youtube, y acordate, crear es maravilloso 😀

GRACIAS!! MUCHAS GRACIAS POR SUBIR ESTE POST!!
Me gustaMe gusta
Gracias a vos por el comentario 😀
Me gustaMe gusta
esta el codigo completo ?
Me gustaMe gusta
Tengo un pregunta. Los 180 grados en sentido horario que se mueve el motor son para que caiga la comida (abriendo el paso de la compuerta), ¿verdad? y los 50 grados en sentido anti horario, ¿para qué son? ¿para que deje de caer la comida; es decir, se tape la compuerta?
Me gustaMe gusta
oye no puedo subirlo al arduino…..
que puedo hacer que me recomiendas
Me gustaMe gusta
Hola es necesario,que en el lugar donde este ubicado el alimentador,haya wi fi ? Gracias
Me gustaMe gusta
Hola me podrias pasar el codigo de la app en app inventor?.Gracias,
Me gustaMe gusta
Pues segun la compuerta, si es circular con el eje diametral, con 180 grados damos media vuelta. Eso supone que ha caido algo de pienso mientras giraba, luego queda cerrado hasta que gira 50 grados. Aqui no se entiende para que lo haces, ¿son pruebas o es otro tipo de compuerta rarilla?
Esto solo funciona con BT, por lo que estamos a menos de 10m, muy interesante … como ejercicio.
De paso comentar que quien pretenda hacer esto con un motor paso a paso modificando esa secuencia expuesta, se puede encontrar con que el pienso bloquee el cierre. Eso va a suponer la perdida del punto home de la compuerta y su desplazamiento acumulando errores de posición con los problemas subsiguientes en la maniobra de esta compuerta.
Me gustaMe gusta